Όταν οι περισσότεροι από εμάς σηκώνουν ένα αντικείμενο, δεν χρειάζεται να σκεφτόμαστε πώς να το προσανατολίσουμε στο χέρι μας. Είναι κάτι που μας έρχεται φυσικά καθώς μαθαίνουμε να περιηγούμαστε στον κόσμο. Αυτό είναι κάτι που επιτρέπει στα μικρά παιδιά να είναι πιο επιδέξια με τα χέρια τους ακόμη και από τα πιο προηγμένα ρομπότ που είναι διαθέσιμα σήμερα.
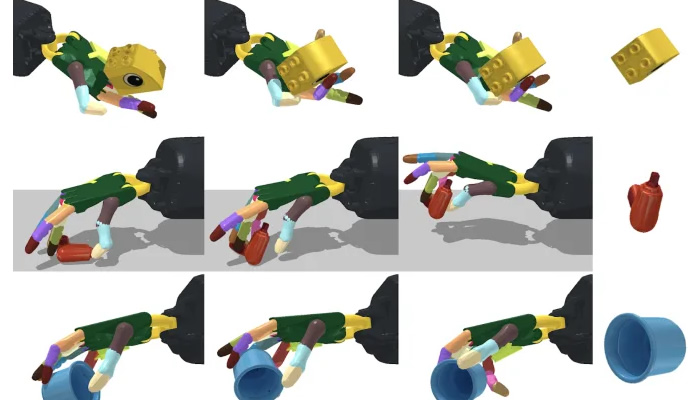
Αλλά αυτό θα μπορούσε να αλλάξει γρήγορα. Μια ομάδα επιστημόνων από το Εργαστήριο Επιστήμης Υπολογιστών και Τεχνητής Νοημοσύνης του MIT ανέπτυξε ένα σύστημα που μια μέρα θα μπορούσε να δώσει στα ρομπότ το ίδιο είδος επιδεξιότητας. Χρησιμοποιώντας έναν ενίσχυσης χωρίς μοντέλα αλγόριθμο AI, δημιούργησαν ένα προσομοιωμένο, ανθρωπόμορφο χέρι που μπορούσε να χειριστεί περισσότερα από 2.000 αντικείμενα. Επιπλέον, το σύστημα δεν χρειαζόταν να ξέρει τι επρόκειτο να σηκώσει για να βρει έναν τρόπο να το μετακινήσει στο χέρι του.
Το σύστημα δεν είναι ακόμα έτοιμο για χρήση σε πραγματικό κόσμο. Για να ξεκινήσει, η ομάδα πρέπει να το μεταφέρει σε ένα πραγματικό ρομπότ. Αυτό μπορεί να μην είναι τόσο εμπόδιο όσο νομίζετε. Στην αρχή της χρονιάς, είδαμε ερευνητές από το Πανεπιστήμιο Zhejiang και το Πανεπιστήμιο του Εδιμβούργου να μεταφέρουν με επιτυχία μια προσέγγιση ενίσχυσης της τεχνητής νοημοσύνης στον ρομπότ σκύλο τους Jueying. Το σύστημα επέτρεψε στο ρομπότ να μάθει πώς να περπατά και να αναρρώνει από πτώσεις μόνο του.
Όπως έχουν τα πράγματα, ούτε το σύστημα είναι τέλειο. Μπορεί να επαναπροσανατολίσει πολλά μικρότερα αντικείμενα, όπως μπάλες του τένις και μήλα, με ποσοστό επιτυχίας σχεδόν 100%, αλλά εργαλεία όπως τα κατσαβίδια και το ψαλίδι αποτελούν πρόκληση. Όταν πρόκειται για τέτοιους τύπους αντικειμένων, το ποσοστό επιτυχίας του πέφτει πιο κοντά στο 30 τοις εκατό. Ωστόσο, οι δυνατότητες του συστήματος είναι τεράστιες. Θα μπορούσε μια μέρα να κάνει τα ρομπότ καλύτερα στο χειρισμό εργαλείων και να τα κάνει πολύ πιο αποτελεσματικά σε εργασίες όπως η συσκευασία κουτιών.